Nowadays, work-related musculoskeletal disorders have a drastic impact on a large part of the world population. In particular, low-back pain counts as the leading cause of absence from work in the industrial sector. Robotic exoskeletons have great potential to improve industrial workers’ health and life quality. Nonetheless, current solutions are often limited by sub-optimal control systems. Due to the dynamic environment in which they are used, failure to adapt to the wearer and the task may be limiting exoskeleton adoption in occupational scenarios. In this scope, we present a deep-learning-based approach exploiting inertial sensors to provide industrial exoskeletons with human activity recognition and adaptive payload compensation. Inertial measurement units are easily wearable or embeddable in any industrial exoskeleton. We exploited Long-Short Term Memory networks both to perform human activity recognition and to classify the weight of lifted objects up to 15 kg. We found a median F1 score of [Formula: see text] (activity recognition) and [Formula: see text] (payload estimation) with subject-specific models trained and tested on 12 (6M-6F) young healthy volunteers. We also succeeded in evaluating the applicability of this approach with an in-lab real-time test in a simulated target scenario. These high-level algorithms may be useful to fully exploit the potential of powered exoskeletons to achieve symbiotic human-robot interaction.© 2023. The Author(s).
IMU-based human activity recognition and payload classification for low-back exoskeletons.
Jan 23, 2023
REFERENCES & ADDITIONAL READING
PubMed
MORE ARTICLES BELOW
PW Weekly Newsletters
The latest articles and insights from your colleagues in your specialty(ies) of choice.
RECOMMENDED ARTICLES FOR YOU
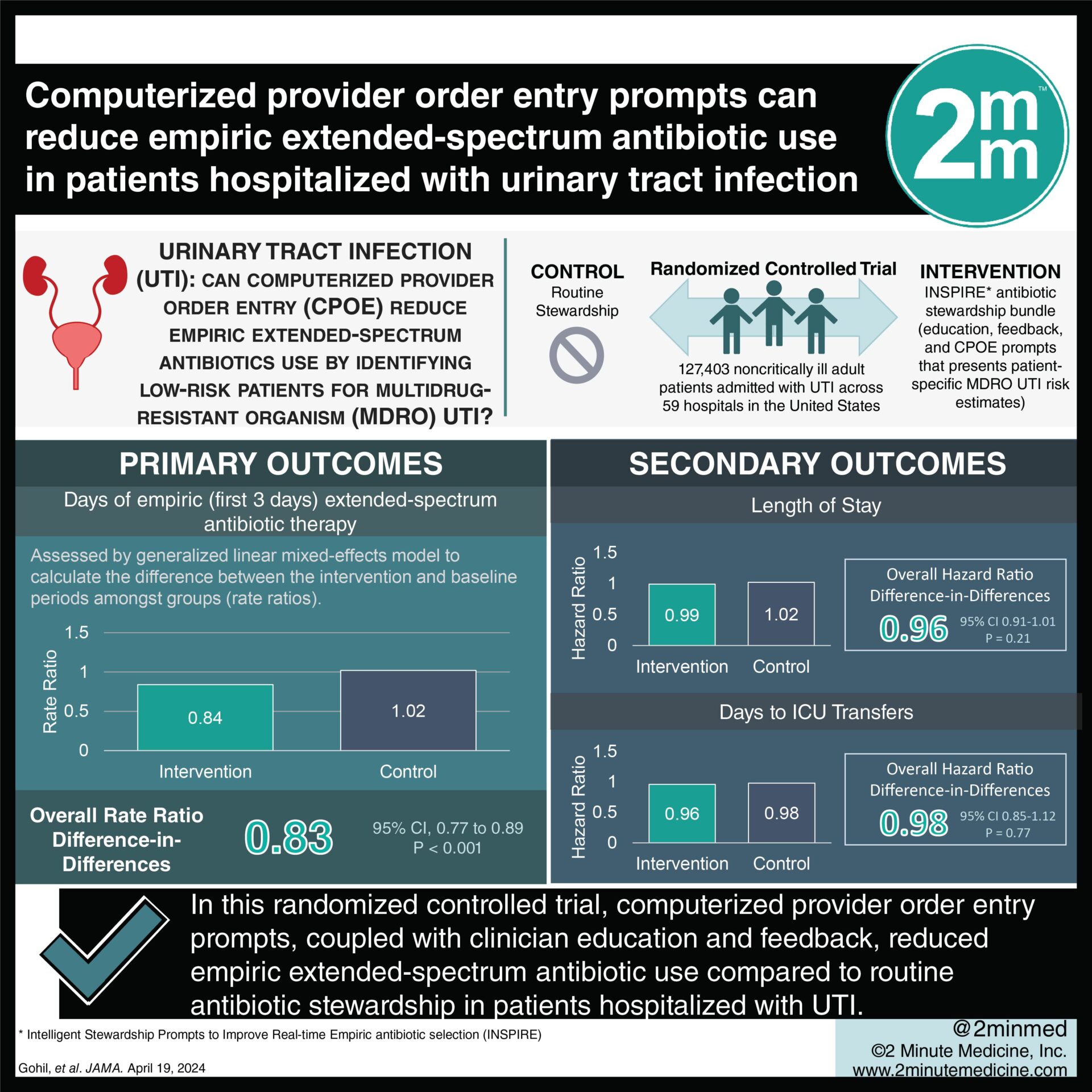
#VisualAbstract: Computerized provider order entry prompts can reduce empiric extended-spectrum antibiotic use in patients hospitalized with urinary tract infection
#VisualAbstract: Computerized provider order entry prompts can reduce empiric extended-spectrum antibiotic use in patients hospitalized with urinary tract infection


Advertisement
PW PODCAST

What & Why You Need to Know About Value-Based Care
Apr 10, 2024Physician Liability & AI, the Checkmate 67T Trial
Mar 27, 2024Advertisement


MORE ARTICLES BELOW
PW Weekly Newsletters
The latest articles and insights from your colleagues in your specialty(ies) of choice.
RECOMMENDED ARTICLES FOR YOU
#VisualAbstract: Computerized provider order entry prompts can reduce empiric extended-spectrum antibiotic use in patients hospitalized with urinary tract infection
#VisualAbstract: Computerized provider order entry prompts can reduce empiric extended-spectrum antibiotic use in patients hospitalized with urinary tract infection
PW PODCAST
What & Why You Need to Know About Value-Based Care
Apr 10, 2024Physician Liability & AI, the Checkmate 67T Trial
Mar 27, 2024Advertisement


Stay connected to the latest news with Physician’s Weekly
Insights from the leaders in medical research, trending topics in clinical medicine, and perspectives from your colleagues.
Subscribe to our free Newsletters to receive weekly emails, and even get a laugh or two from our medical cartoons.